郑大可出生日期:1989.05 学历:工学博士 毕业院校:哈尔滨工业大学 工作单位:中科院深圳先进技术研究院-深圳优必选科技联合培养博士后/运动规划及控制高级算法工程师 邮箱:zdkhit@126.com 地址:广东省深圳市南山区 |

|
最新消息
1.消息:….
研究方向
- 机器人系统(机械臂、AGV、无人机、无人叉车)运动规划与控制、机器学习、优化与控制、规划与决策、强化学习
项目研究
中科院深圳先进技术研究院-深圳优必选科技(2019.07 - 至今)
- 机械臂自主运动控制研究



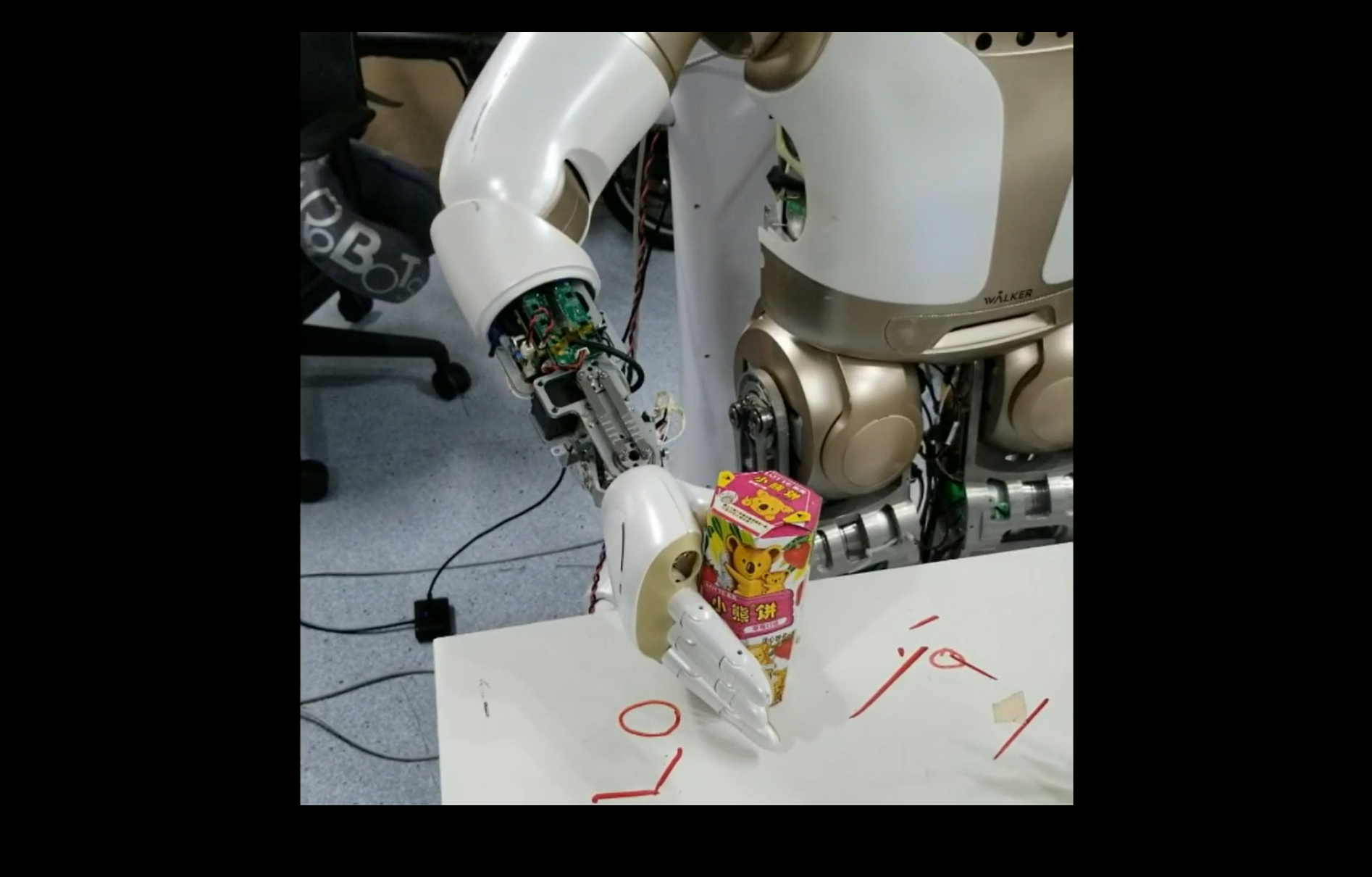
- 机械臂高动态抛接物体运动控制

-
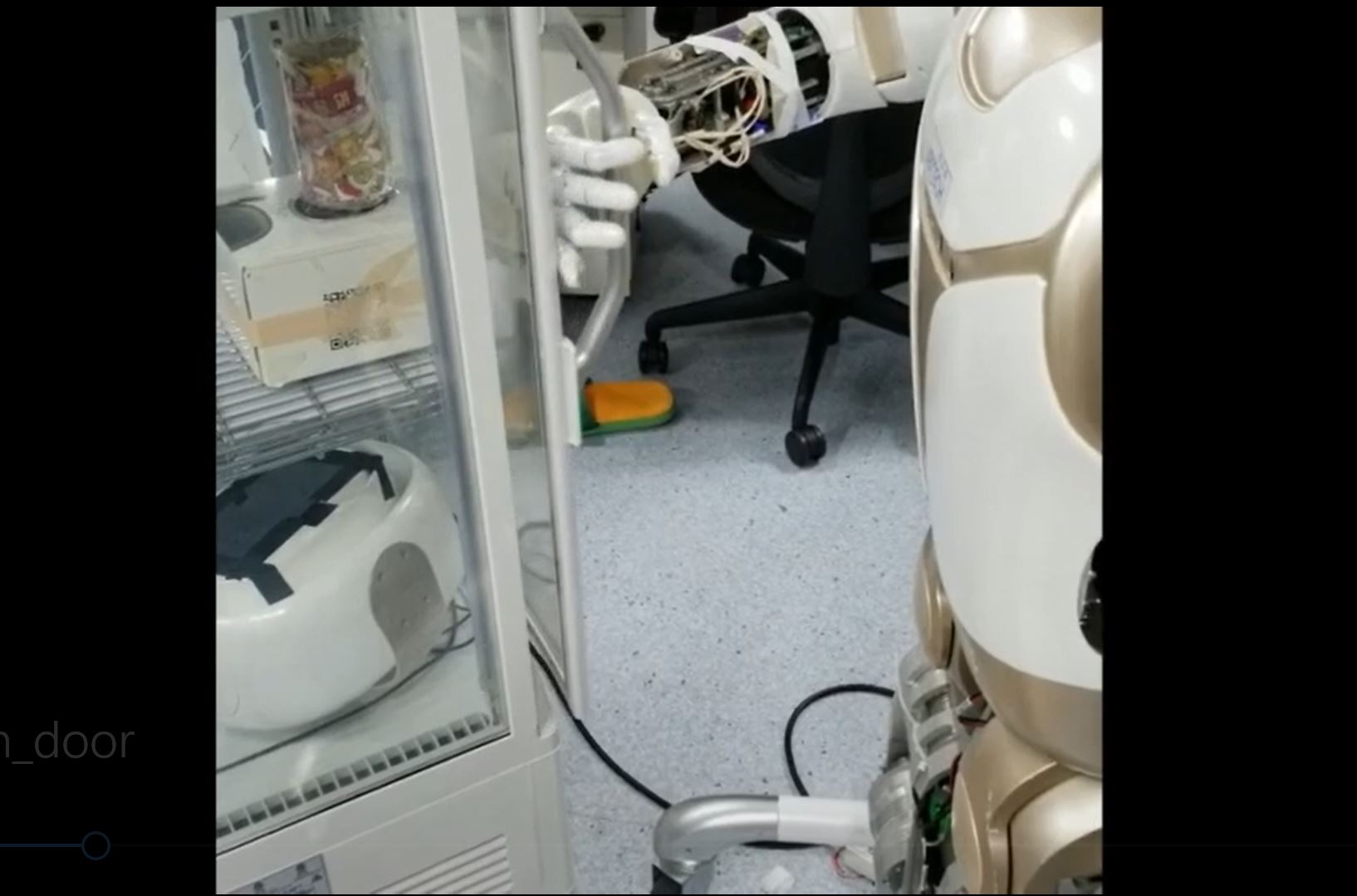
机械臂凹形障碍物静/动态避障研究
-
机械臂具有工作空间约束的静/动态避障研究

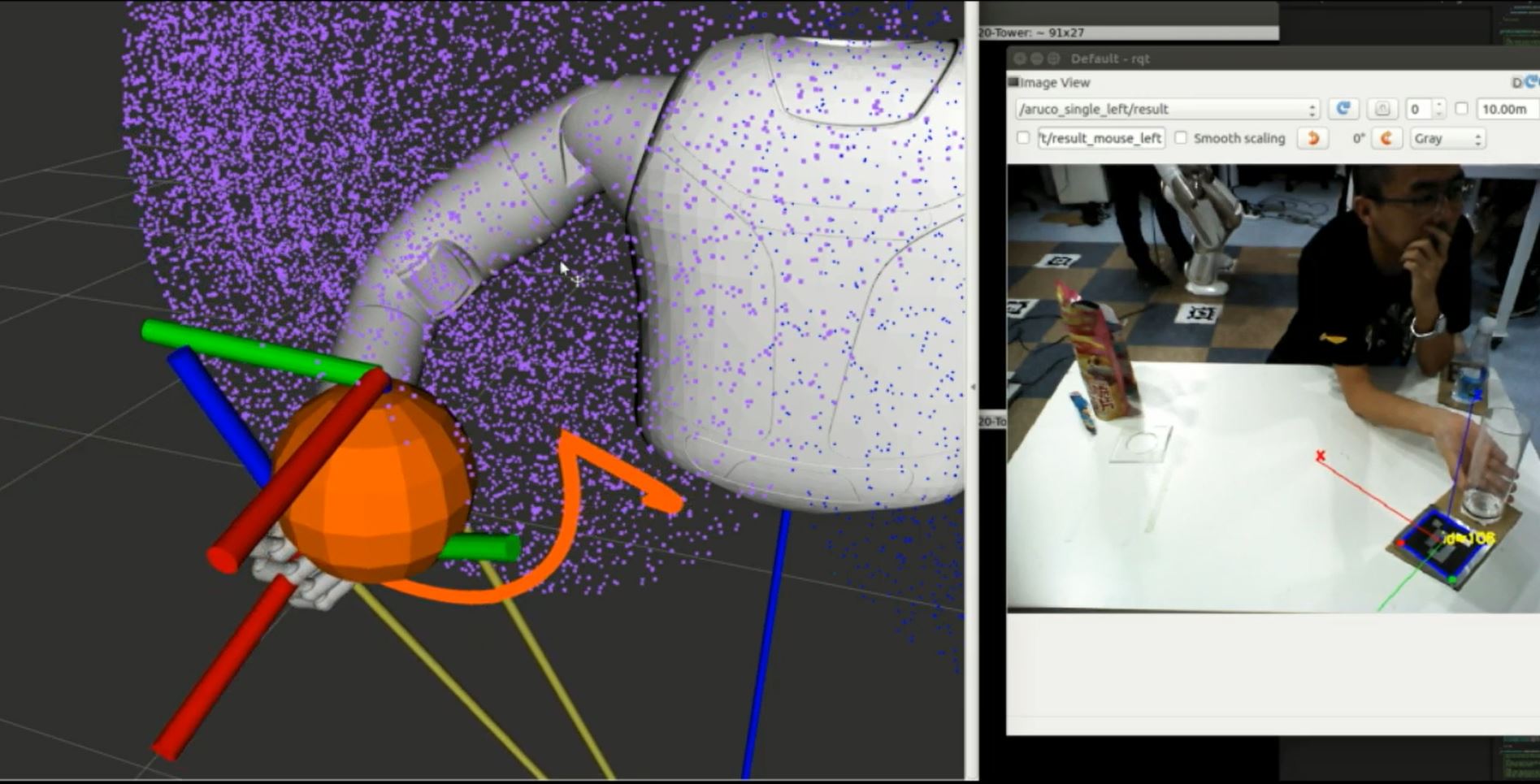
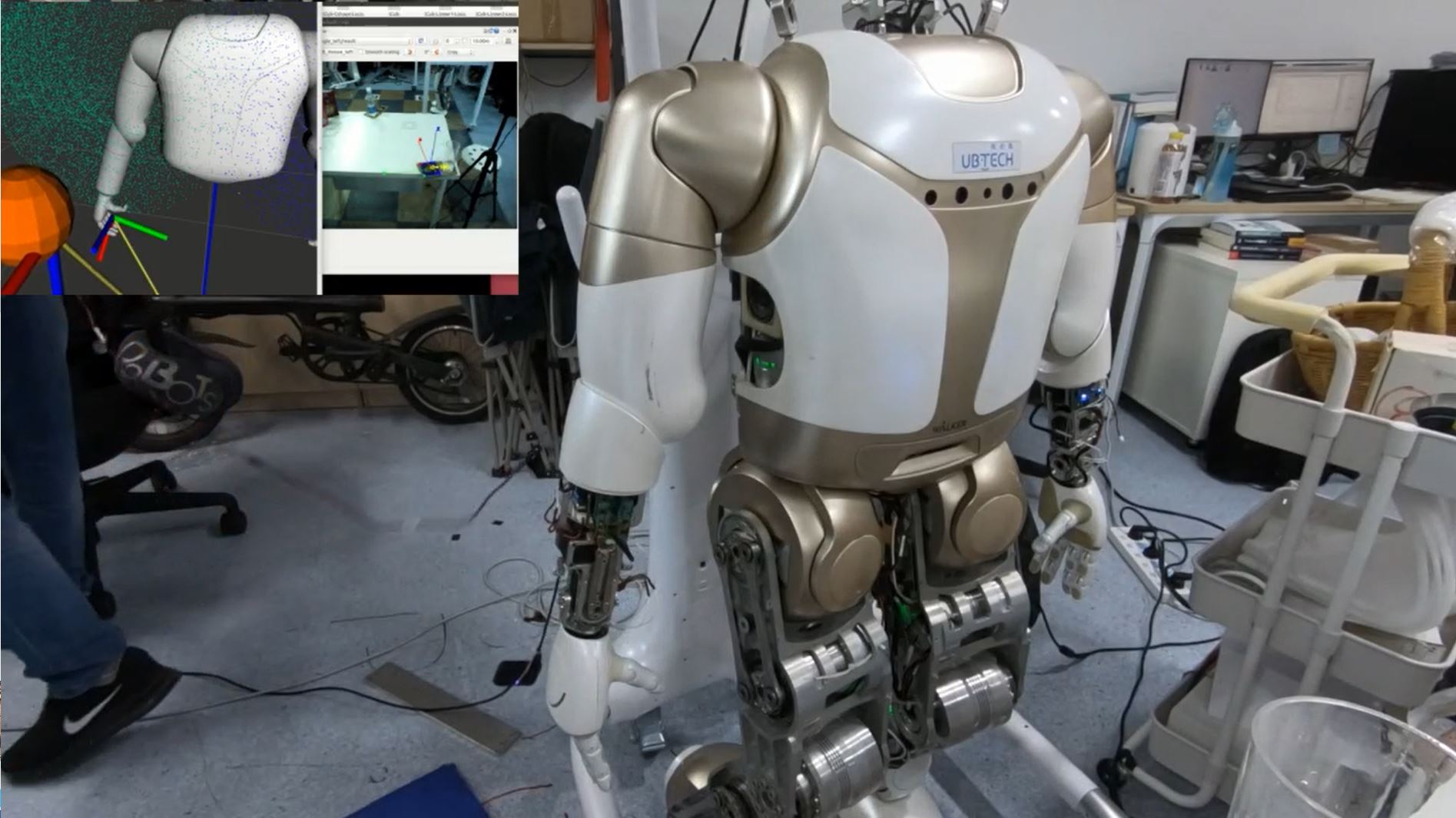
- 机械臂全身静/动态避障研究
未来机器人有限公司(2018.07 - 2019.06)
-
电动叉车
-
小型搬运AGV
苏州博众精工科技有限公司(2017.11 - 2018.07)
- 高精度五轴数控测量机误差补偿及运动控制研究
比亚迪汽车工业有限公司(2017.07 - 2017.11)
- 双离合汽车变速器控制策略研究
哈尔滨工业大学攻读博士研究生(2013.09 - 2017.06)
哈尔滨工业大学攻读硕士研究生(2011.09 - 2013.07)
发表的学术论文
- A Dynamical System Approach to Real-time Three-Dimensional Concave Obstacle Avoidance. Dake Zheng; Xinyu Wu; Yizhang Liu; Jianxin Pang. 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). pdf
- Adaptive Backstepping-Flatness Control Based on an Adaptive State Observer for a Torque Tracking Electrohydraulic System. Dake Zheng; Hongguang Xu. IEEE/ASME Transactions on Mechatronics, Year: 2016 | Volume: 21, Issue: 5. pdf
- Robust H∞ control of a friction based electrohydraulic load simulator. Dake Zheng; Hongguang Xu. 2017 29th Chinese Control And Decision Conference (CCDC). pdf
- Nonlinear adaptive backstepping control of a friction based electro-hydraulic load simulator using chebyshev neural networks. Dake Zheng; Hongguang Xu. 2017 29th Chinese Control And Decision Conference (CCDC). pdf
- Modeling and high accuracy parameter estimates for a friction based electro-hydraulic load simulator. Dake Zheng; Hongguang Xu. 2016 IEEE International Conference on Mechatronics and Automation. pdf